/https://www.ilsoftware.it/app/uploads/2026/07/robot-aspirapolvere-per-maker.jpg "Robot aspirapolvere open source da costruire in casa: arriva OOMWOO")
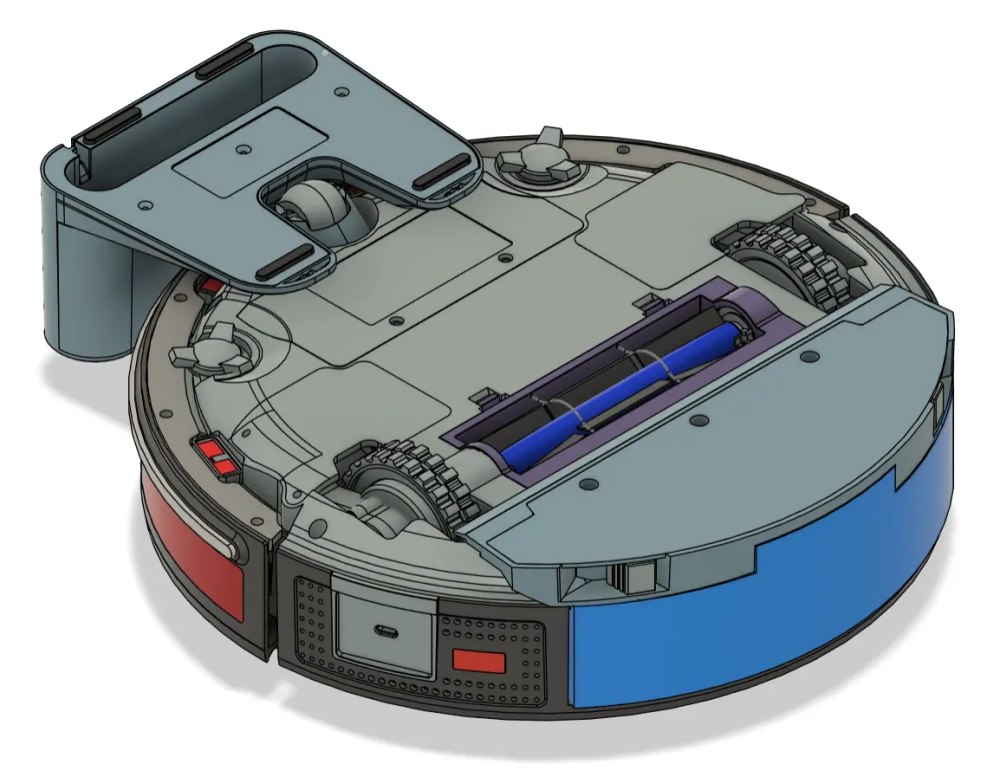
Un robot aspirapolvere che non dipende dal cloud del produttore, da un’app chiusa e da componenti difficili da riparare? Il progetto OOMWOO offre tutto il necessario per realizzare in autonomia un robot aspirapolvere open source, stampabile in 3D e controllabile in locale, basato su Raspberry Pi, ROS 2 (Robot Operating System 2), LiDAR 2D e integrazione con Home Assistant. Non si tratta di un prodotto finito pronto per il grande pubblico, ma di una piattaforma tecnica aperta, pensata per chi vuole capire, modificare e riparare il dispositivo che pulisce casa.
In oltre 20 anni il settore dei robot aspirapolvere ha cambiato pelle: dai percorsi pseudo-casuali si è passati a mappe persistenti, SLAM, LiDAR, telecamere RGB, sensori ToF, docking station con svuotamento automatico e app mobili sempre più centrali. La parte meno visibile, però, è rimasta spesso chiusa: firmware proprietari, server remoti, account obbligatori, ricambi non sempre documentati e dati domestici gestiti secondo le scelte del produttore.
OOMWOO prova a spostare il baricentro: il repository principale del progetto su GitHub conta circa 2700 stelle e oltre 100 fork, un segnale non banale per un’iniziativa annunciata pubblicamente a metà giugno 2026 e ancora in fase di sviluppo.
Il messaggio di fondo è chiaro: un robot deve funzionare anche senza cloud, con parti reperibili autonomamente e una documentazione sufficiente per ricostruire l’intera macchina.
Un robot aspirapolvere open source, non solo un kit per maker
OOMWOO non vuole essere soltanto un telaio dimostrativo con due motori, un sensore di distanza e un microcontrollore. L’obiettivo è avvicinarsi alla qualità di un elettrodomestico reale: telaio stampabile in 3D, elettronica documentata, firmware aperto, pacchetto software basato su ROS 2, navigazione autonoma, mappatura con LiDAR 2D e controllo locale tramite Home Assistant.
La scelta di ROS 2 è centrale. Nei robot aspirapolvere commerciali, la navigazione nasce spesso da stack proprietari, ottimizzati per hardware economico e difficili da analizzare dall’esterno. OOMWOO prende una strada diversa: usa componenti noti nel mondo della robotica, con pacchetti già usati in ricerca, didattica e applicazioni professionali.
La parte di navigazione ruota intorno a Nav2, il framework ROS 2 per pianificazione, controllo, localizzazione e comportamenti di navigazione. In un robot aspirapolvere, Nav2 non serve soltanto a muoversi da un punto A a un punto B: può orchestrare il movimento lungo traiettorie ottimizzate, il ritorno alla base, la gestione di ostacoli, il recupero da blocchi temporanei e la ripresa di un lavoro interrotto. La differenza rispetto a un controllo basilare con sensori di prossimità è enorme: il robot non reagisce soltanto agli urti, ma ragiona su una rappresentazione dello spazio.
LiDAR 2D, SLAM e il limite degli ostacoli bassi
Il sensore chiave della prima versione è un LiDAR 2D. Questa scelta ha senso: un laser scanner bidimensionale permette di ricostruire pareti, mobili e ostacoli alla quota del sensore, con una complessità inferiore rispetto a telecamere stereo o sensori 3D. La mappa generata dal LiDAR descrive bene ciò che intercetta il piano di scansione, ma non vede cavi, calzini, giocattoli bassi, tappeti rialzati e piccoli oggetti sotto la quota della torretta.
La documentazione del progetto OOMWOO riconosce esplicitamente questo limite. La promessa non è superare i top di gamma commerciali nella gestione degli ostacoli, ma creare una piattaforma aperta su cui sperimentare.
Nella prima versione ufficiale, OOMWOO dovrebbe affidarsi anche al bumper per gli ostacoli invisibili al LiDAR; la visione con telecamere e riconoscimento degli oggetti rientra tra gli obiettivi successivi o sperimentali. È una distinzione importante, perché il marketing dei robot aspirapolvere tende spesso a confondere mappatura e comprensione reale dell’ambiente.
Lo SLAM, cioè la costruzione simultanea della mappa e della posizione del robot, resta comunque una funzione essenziale. Durante la prima pulizia, il robot deve esplorare gli ambienti, produrre una mappa coerente e usarla per non perdere l’orientamento. Nelle sessioni successive può sfruttare una mappa salvata e rilevare la sua posizione, riducendo esplorazioni ridondanti e migliorando la gestione delle zone.
Raspberry Pi 5, ESP32 e micro-ROS: la questione delle risorse
L’architettura su cui si basa OOMWOO è, in prima battuta, un single-board computer Raspberry Pi 5 abbinato a ESP32 con micro-ROS.
Un robot aspirapolvere commerciale può funzionare con processori molto più modesti perché il produttore controlla tutto lo stack, ottimizza pesantemente il software e usa firmware chiusi costruiti intorno al proprio hardware. OOMWOO, invece, vuole usare componenti open e general purpose, con un costo inevitabile in termini di memoria e potenza di calcolo.
Raspberry Pi 5 usa un Broadcom BCM2712 con CPU quad-core Arm Cortex-A76 a 2,4 GHz e memoria LPDDR4X-4267 in tagli che arrivano fino a 16 GB. Per un progetto ROS 2 con simulazione, mappatura, navigazione e possibile elaborazione di sensori aggiuntivi, partire da una scheda più capace semplifica la fase iniziale. Non significa che un robot aspirapolvere richieda sempre una scheda così potente. La prima versione del progetto vuole però privilegiare rapidità di sviluppo, debug e compatibilità con i pacchetti esistenti.
Se il progetto manterrà la promessa di funzionare in locale, senza obbligo di cloud, con documentazione completa e componenti acquistabili separatamente, potrà colmare un vuoto reale. Molti utenti non chiedono soltanto un robot più economico: chiedono un dispositivo che non diventi inutile quando il produttore cambia server, chiude un’app o smette di vendere ricambi. OOMWOO non risolve ancora tutti questi problemi, ma li affronta dalla parte giusta: quella della trasparenza tecnica.
/https://www.ilsoftware.it/app/uploads/2024/12/1-39.jpg "Samsung Galaxy Ring 2 potrebbe alzare l'asticella degli smart ring: ecco perché")
/https://www.ilsoftware.it/app/uploads/2026/06/raspberry-pi-pico-w-adattatore-usb-wifi.jpg "Raspberry Pi Pico W diventa adattatore WiFi USB: il progetto open")
/https://www.ilsoftware.it/app/uploads/2026/06/amazon-echo-show-5-monitoraggio-rete-dashboard.jpg "Credevano fosse da buttare: oggi questo Echo Show monitora un'intera rete")
/https://www.ilsoftware.it/app/uploads/2024/02/Amazon-Echo-Hub.png "Amazon Echo Hub cambia volto grazie a un nuovo aggiornamento")